MINI SCARA ROBOT
AUTOMAZIONE - STAMPA 3D - ARDUINO
AUTOMAZIONE - STAMPA 3D - ARDUINO
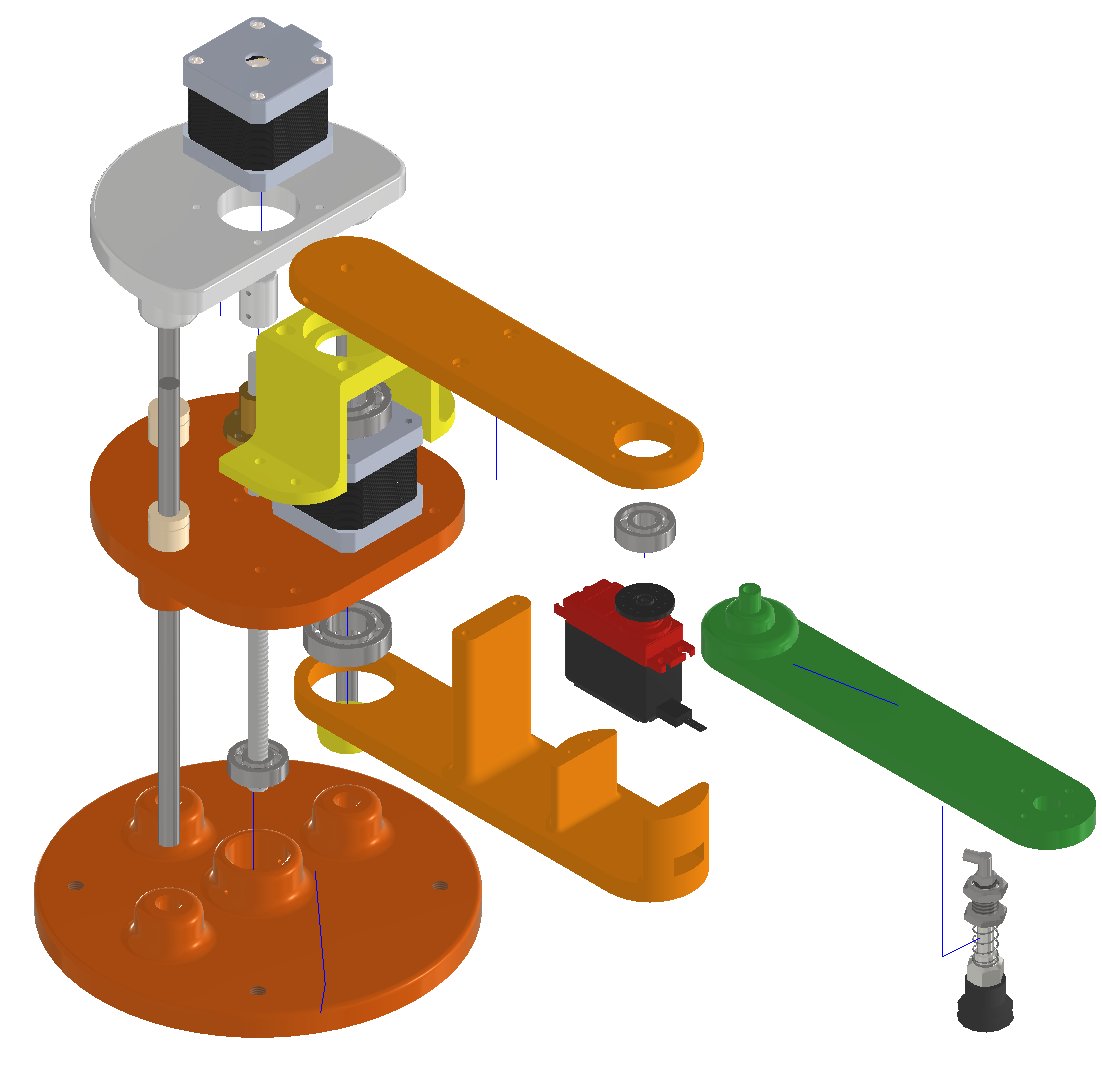
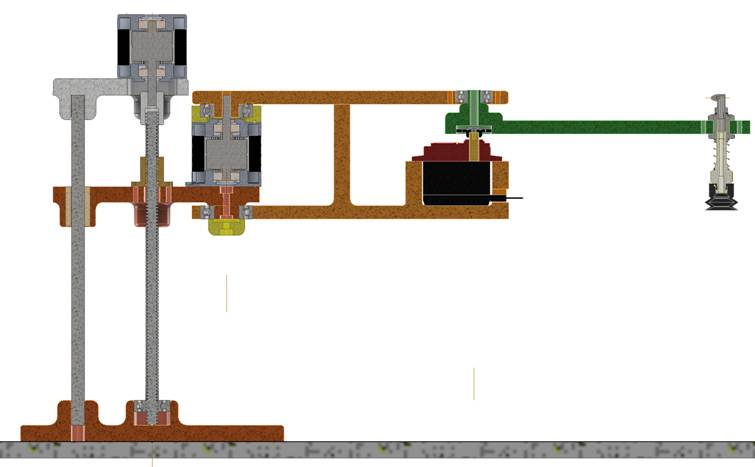
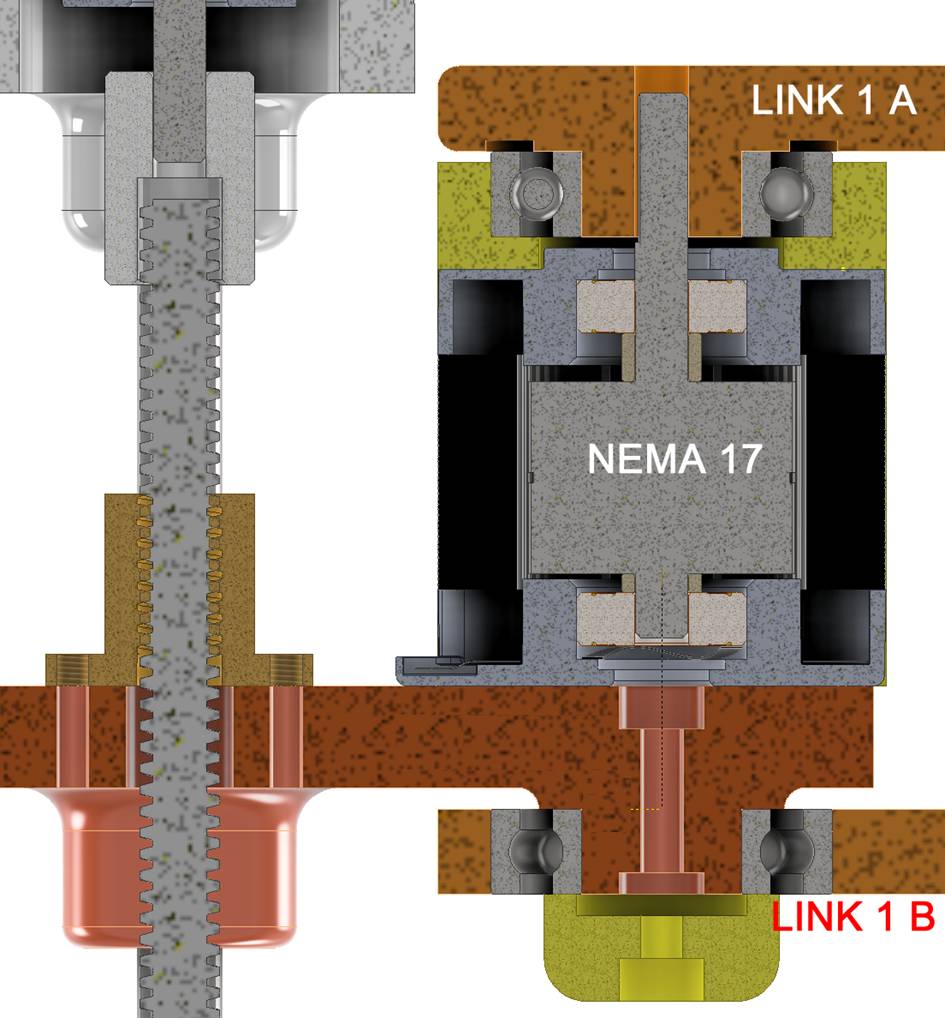
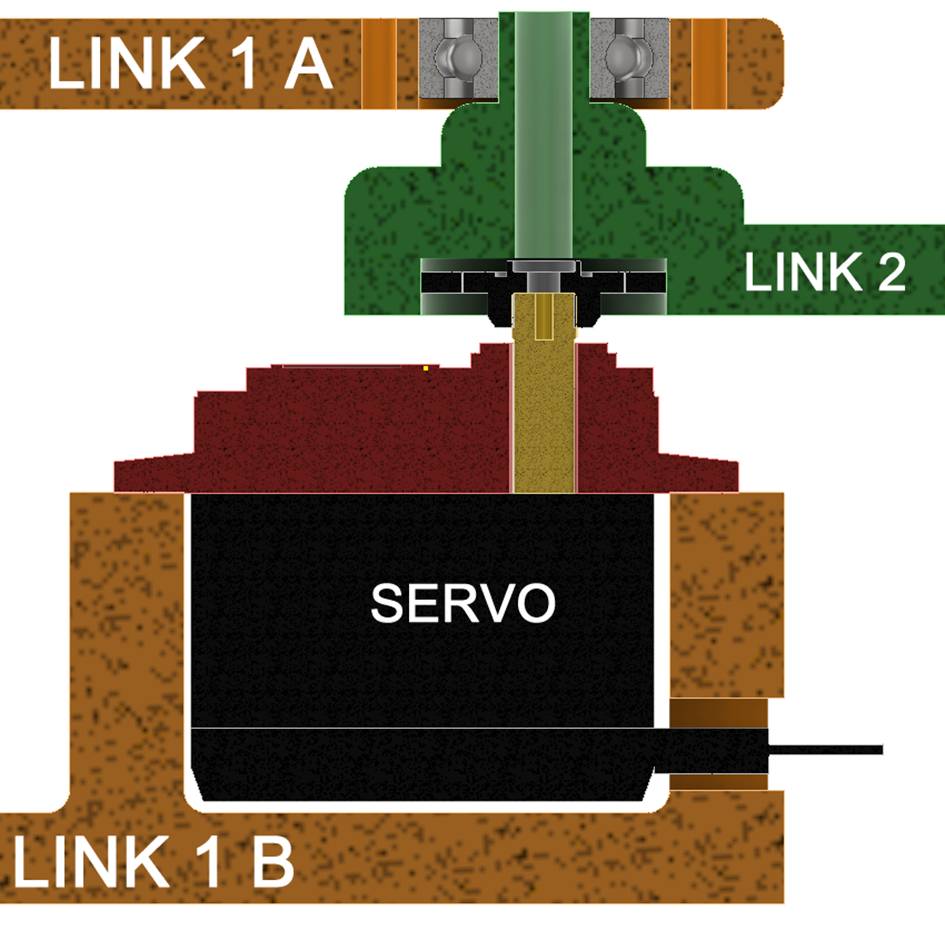
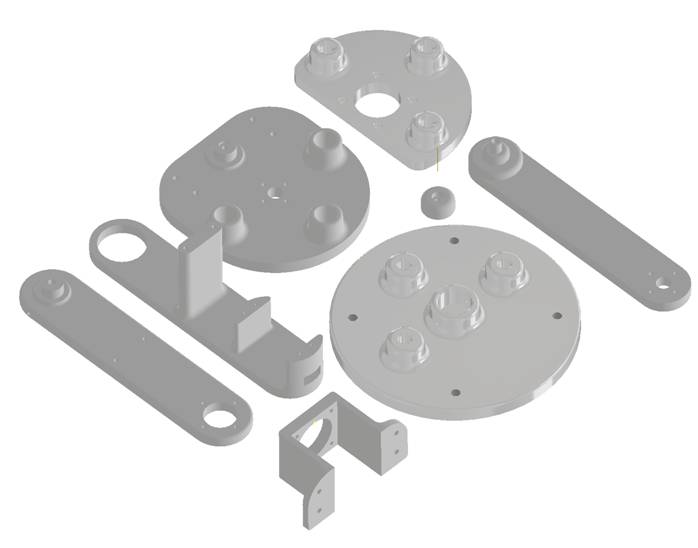

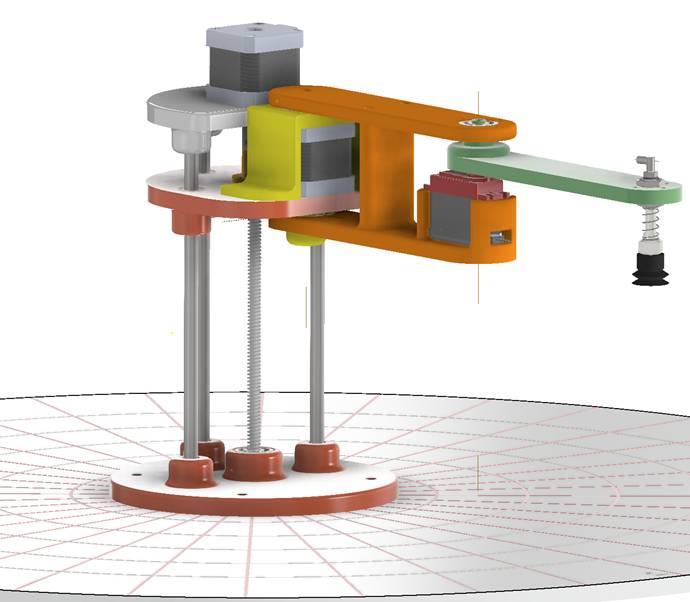
Il robot in oggetto è stato progettato per essere stampato in 3D in modo semplice senza l’utilizzo di supporti. Si consiglia di utilizzare un riempimento almeno del 35% per dare alle singole parti una sufficiente rigidezza. Il movimento verticale è realizzato tramite un motore stepper NEMA 17 posto alla sommità del robot e fissato sul “piatto alto” tramite 4 viti da sotto. La barra filettata T8 2mm è mantenuta in asse sul piano orizzontale tramite un cuscinetto fissato nella sede presente sul “piatto basso” . Sul “piatto mobile” è fissato il dado filettato T8 che scorre sulla barra filettata. Il “piatto mobile” viene mantenuto in asse grazie a tre guide in acciaio da 8mm di diametro e a tre cuscinetti lineari LM8UU. Un secondo motore stepper NEMA 17, fissato al “piatto mobile” tramite un apposito fermo, consente il movimento angolare del link 1 che è costituito da due parti A e B. Le due parti vengono unite fa loro tramite due viti e ruotano su due cuscinetti a sfere 32x15x8. Sulla parte B del link 1 è realizzata la sede per il servo motore MMG996R. L'albero del servo è fissato tramite il suo disco a corredo al link 2. Il link 2 ruota sul cuscinetto a sfere 22x8x7 fissato nella parte terminale del link 1 parte A.